All main robot components are from standard
Lego Mindstorms NXT 2.0 kit. Few additional Lego bars (black) were used to make costruction more solid, but they can be replaced with lighter parts from NXT 2.0 set.
Complete robot view
Building instructions
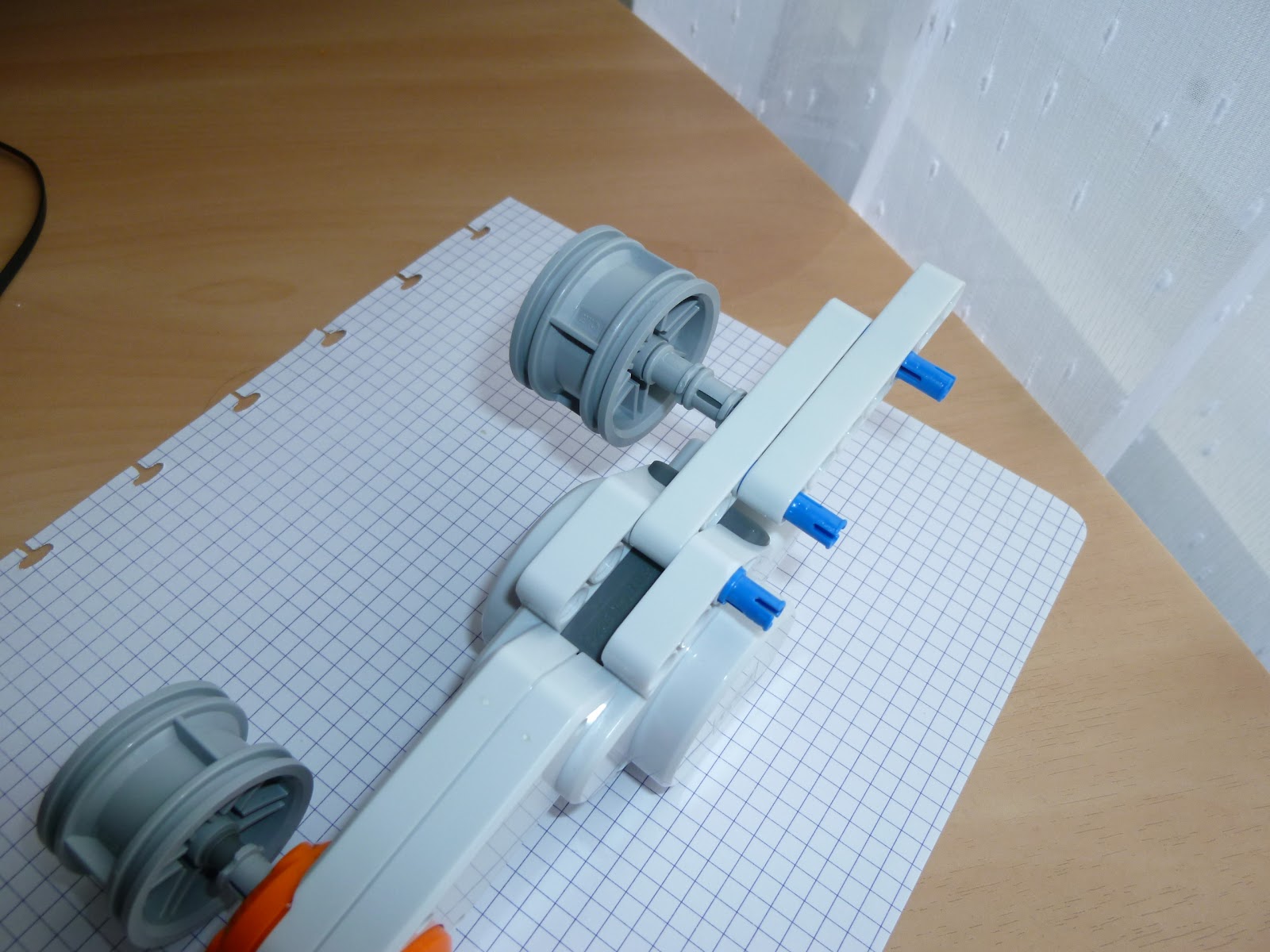
Servo for left track (partially assembled)
Complete servo for left track
Left track with servo, assembled
Both left and right tracks and servos assembled
Connecting robot base parts together (side view)
Connecting robot base parts together (back view)
Turnable (servo) platform with ultrasonic sensor, parts
Ultra sonic sensor platform, assembled
Front view of robot base just before sonic platform installed
Robot base with ultra sonic platform installed
Fixings for NXT Brain
Robot base with NXT Brain fixings, assembled
NXT Brain mounted on the robot platform
Installing contact and color sensor, front view
Contact sensor on the back
Complete NXT Rover Robot (no wires connected yet)